# CLIP 工作
# 2021 Learning Transferable Visual Models From Natural Language Supervision(CLIP)
学习自朱毅老师的
CLIP逐段精读。
贡献:
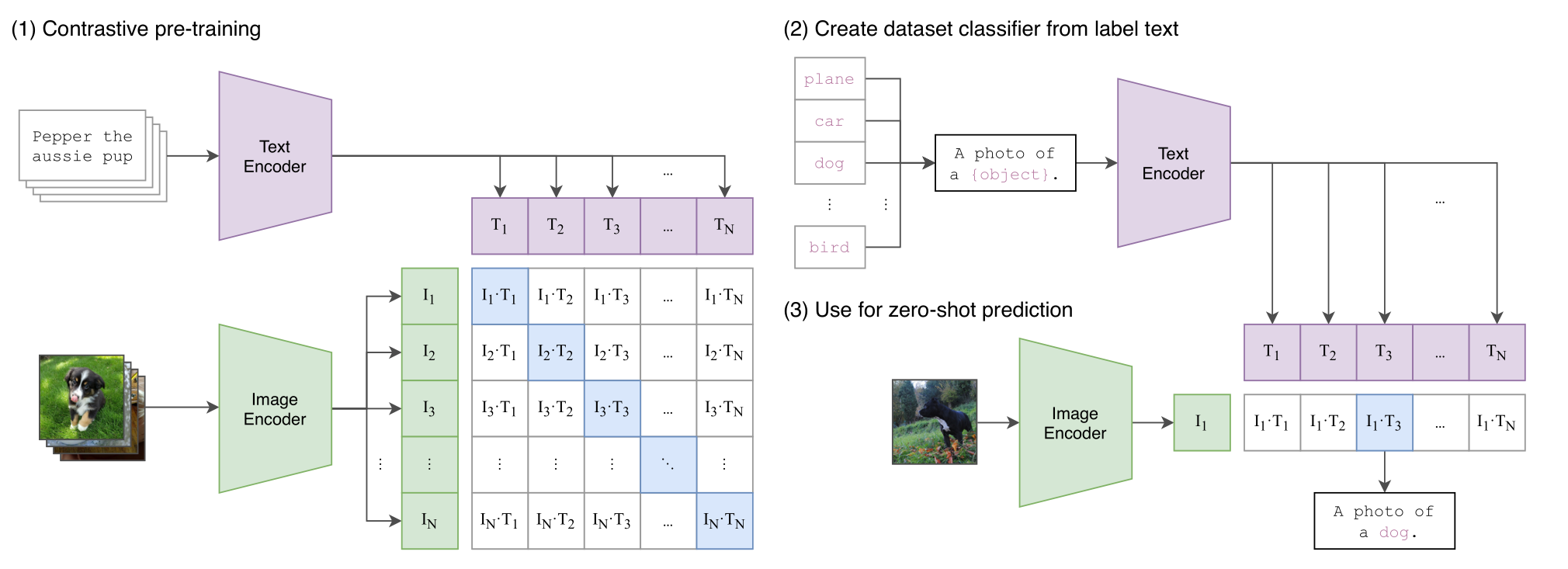
- (1)通过文本和图像的对比学习,模型学习到文本 - 图像对的匹配关系。
- (2)能够实现通过给定一张图像,在多个文本标签中选择出与图像最相关的文本。也可以实现给定一个文本,选择最符合相关的图像。
创新:
- 实现文本与图像的多模态学习。
- 实现实现无标签限制的图像分类,也可以实现无图像限制的文本 - 图像配对。前者可以用于图像中的物体识别,后者可以用于文本检索图像。
CLIP 对比学习训练代码:
# image_encoder - ResNet 或者 Vision Transformer | |
# text_encoder - CBOW 或者 Text Transformer | |
# I [n, h, w, c] - 图像形状 | |
# T [n, l] - 文本形状,l 是序列长度 | |
# W_i [d_i, d_e] - 图像的线性投射矩阵 | |
# W_t [d_t, d_e] - 文本的线性投射矩阵 | |
# t - learned temperature parameter | |
# 分别提取图像特征和文本特征 | |
I_f = image_encoder(I) #[n, d_i] | |
T_f = text_encoder(T) #[n, d_t] | |
# 对两个特征进行线性投射,得到相同维度的特征,并进行 l2 归一化 | |
I_e = l2_normalize(np.dot(I_f, W_i), axis=1) | |
T_e = l2_normalize(np.dot(T_f, W_t), axis=1) | |
# 计算缩放的余弦相似度:[n, n] | |
logits = np.dot(I_e, T_e.T) * np.exp(t) | |
# 对称的对比学习损失:等价于 N 个类别的 cross_entropy_loss | |
labels = np.arange(n) # 对角线元素的 labels | |
loss_i = cross_entropy_loss(logits, labels, axis=0) | |
loss_t = cross_entropy_loss(logits, labels, axis=1) | |
loss = (loss_i + loss_t)/2 |
# 多模态在分割的应用
# 2022 ICLR Language-driven semantic segmentation(LSeg)
学习自朱毅老师的逐段精读。
贡献:
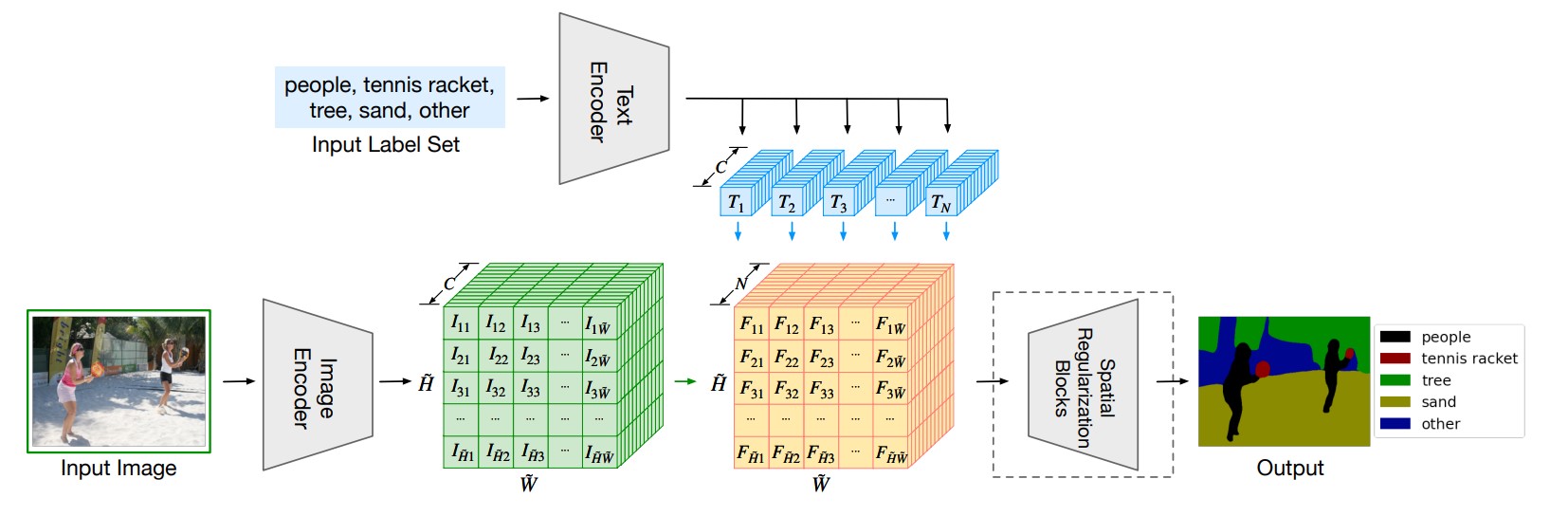
- 将
CLIP的原始文本编码器作为需分割的物体标签的文本编码器,以充分提取文本特征。 - 将文本特征与图像特征通过矩阵相乘融合得到多模态特征,上采样后与
Ground-truth在像素级使用cross entropy loss进行训练。 - 测试时可以实现,根据需要分割的对象的文本标签,分割特定图像的内容。
创新:
- 一篇把
CLIP模型运用到分割任务且有效果的工作。 - 采用监督学习的方式训练,而不是对比学习去训练,也是为了更好地与特定分割任务适应。
不足:
- 依然是有监督学习,目标函数不是对比学习的目标函数。
- 文本特征只是用于融合多模态特征,并没有提供监督信号。
- 依然依赖于手工标注
segmentation mask。
(可以做识别物体位置的实践)
# 2022 CVPR GroupViT:Semantic Segmentation Emerges from Text Supervision(GroupViT)

学习自朱毅老师的逐段精读。
这篇是分割采用无监督学习的思路。主要使用的是分割中的
Grouping思想。展开来讲,Grouping将图像分割做为一种聚类任务,首先在图像确定聚类中心点,然后在模型训练的过程中,不断学习聚类中心周围像素点与聚类中心的相互关系,将与聚类中心相关的像素点并入该聚类中心的Group中。
贡献:
- 使用了文本作为监督信号训练分割任务,不再依赖人工标注的图像
Ground-Truth。 - 使用
Vision Transformer作为图像编码器。在每个Transformer层的输入tokens中加入若干个group tokens,这些group tokens实际上就是预先设想的聚类中心数,也就是猜测的图像有哪些物体类别。经过多个Transformer Layer,Image tokens和这几个group tokens之间的关系被自注意力不断建模与学习。与特定聚类中心接近的image tokens,其特征也越接近该group token的特征。 - 多个
Transformer层后跟一个Grouping Block层。Grouping Block的本质是一个交叉注意力机制,将Image tokens并入所属的Group tokens。每个Grouping Block都将总tokens数降低,因此也减小了计算成本。 - 使用对比学习的方式进行训练,带监督信号的文本被编码后的特征与最后的图像
tokens特征两者交叉熵损失。
创新:
- 首先使用了文本标注分割的
Ground-Truth,不再依赖繁琐的手工标注。
不足:
- 只能分割特定数量的类别,无法分割任意数量的物体。测试时,必须指定分割物体的数目,最后得到模型输出的
tokens与文本标签进行余弦相似度的计算,确定分割物体的文本标签。 - 训练中没有侧重语义信息,仅训练出了较好的分割能力。
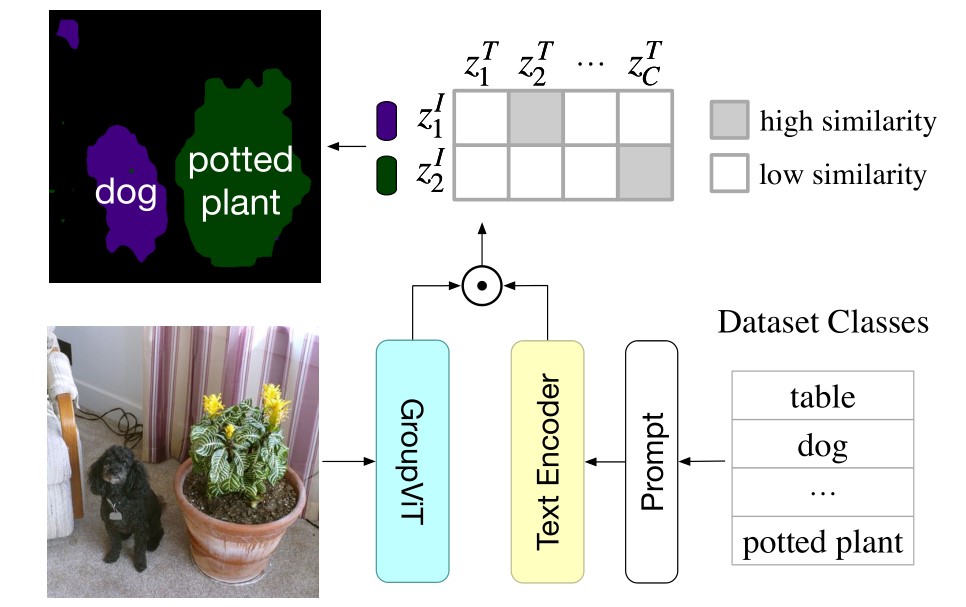
(测试时,模型输出了两个 token ,我们指定分割物体的文本标签有 table、dog...potted plant ,于是可以使用余弦相似度计算得到一个相似度矩阵。对每行取最大的值,对应的文本标签即为该 token 的类别)
# 多模态在检测的应用
# 2022 CVPR Grounded Language-Image Pre-training(Glip)
学习自朱毅老师的逐段精读。
与常规目标检测任务相关的一个任务是
Vision Grounding。具体是根据提供的文本,在图片中找到文本中出现的物体的位置。
贡献:
- 参考
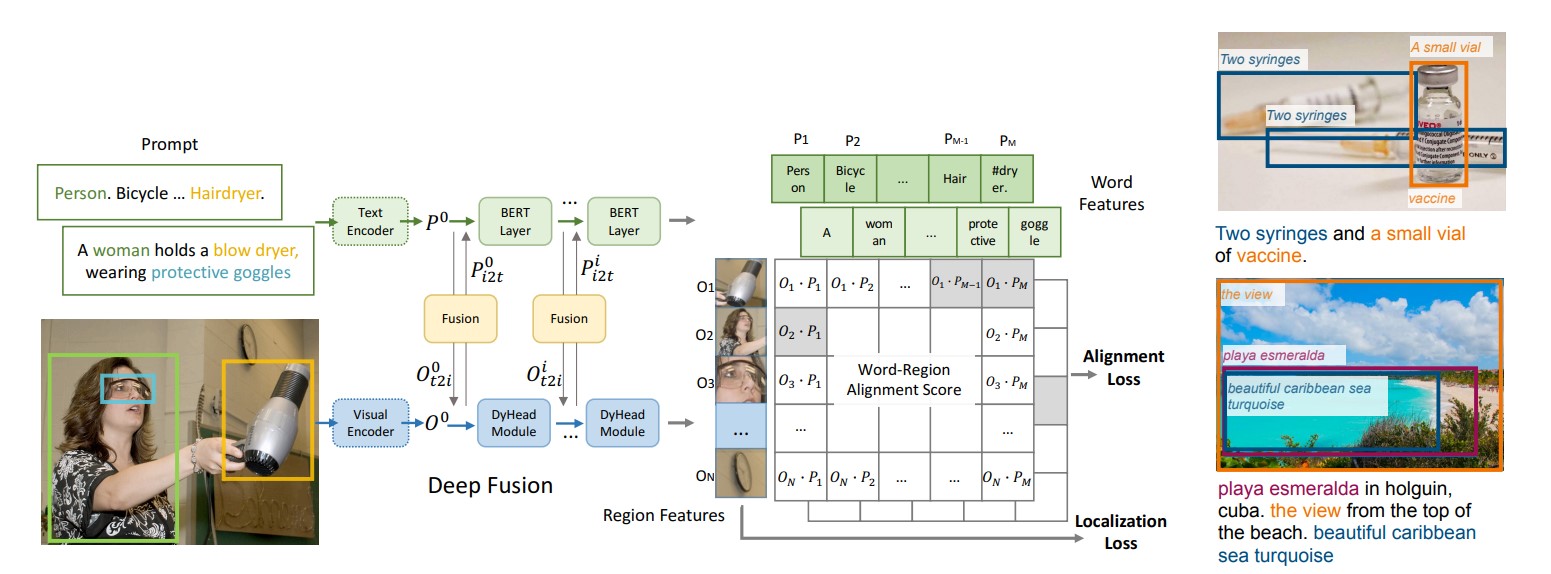
CLIP范式,将图像的Bounding box的region输入图像编码器,将提供的文本输入文本编码器,最后得到每个Bounding box与单词的相似度矩阵。在相似度矩阵上与Ground-Truth的相似度矩阵求定位损失Localization Loss和分类损失Alignment Loss即可完成训练。 - 为了更加充分地学习
Bounding box和文本的Joint Feature,也就是多模态特征。在最后的特征相似度计算前,使用交叉注意力对图像特征和文本特征进行多层交互学习,即Deep Fusion。
创新:
- 使用
Deep Fusion技术以辅助学习多模态特征。 - 将
Gounding任务与目标检测任务很好地结合,并借鉴CLIP的思想做大规模数据的预训练,成功取得了很好的Zero-shot效果。
